オムロンソーシアルソリュ��ーションズ株式会社様
< AIロボット試作品受注 >

上写真:10台の完成試作品を納品した時の様子
■ ご依頼内容
他モデル製作業者で一旦完成済みだった初期版AIロボット試作品に対し、
① 頭部固定構造の強化
② 人認識用極小カメラ取付け構造の提案
③ ロボット下部筐体の再設計
等を施した上で、試作品10台製作のご依頼でした。
■ ① 頭部固定構造の強化
ロボットの頭部は耳の部分を介してボディに固定されており、構造面で特に弱かったのがこの耳とボディとの締結部でした。
既に京王電鉄下北沢駅に試験導入されていたものの、耳の部分での破損から動作不良に繋がる事が多かったそうです。
お預かりした元の3Dデータを拝見すると、耳の部分とボディとをΦ2mmのネジで締結して固定しており、ネジの受け部分も単にネジが食い込むだけの構造でしたので、強度に不安があるのはもちろん、時間とともに緩んでくる可能性がある事が分かりました。
この部分での改良点は2点。
1点目はネジの変更。ネジ径を2mmから4mmにし、ネジの種類もナベネジからボルトとナット形式に変更してタイトな締結ができるようにしました。
2点目は耳と締結するための受け構造をボディ側へ追加した事。
具体的にはΦ4mm用インサートナットを埋め込むための突起をボディ内部後方に設けました。ただ複雑な形状をしたボディと頭との隙間を狙った締結位置の決定には少々悩みました。
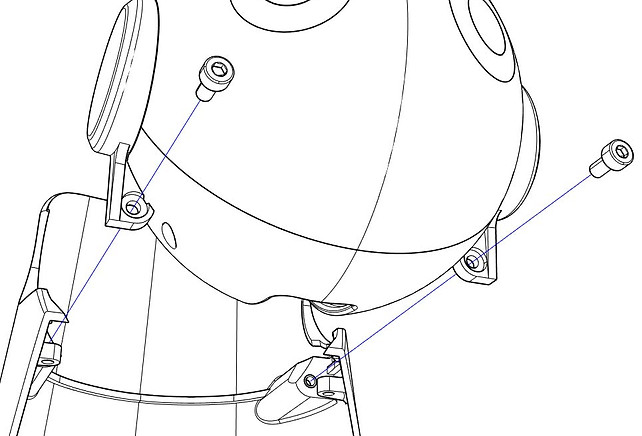
ボディ背面にボルト受け部を設け、耳と一体化した頭部をM4ボルトで固定
修正後の構造で確実に固定できるか確認するために、弊社所有の3Dプリンターで簡易試作部品を製作して実際に組立ててみました。
結果、しっかりとした充分な固定強度が確認できました。

頭部とボディは節約のため一部のみの3Dプリント試作ですが、これで検証を行いました

六角レンチで組立て可能かもチェック/結果しっかりと固定できました
■ ② 人認識用極小カメラ取付け構造の提案
ロボットと向き合う対象者を認識するためのカメラ素子は、3mm弱四方/厚み2mm程の世界最小のもので、元の設計では定位置にカメラを嵌め込んで後ろからテープで固定するというアバウトなものでした。この方法ですと複数のロボットを製作する場合、組立て時にカメラアングルのバラツキが発生します。
このようなバラツキが出ない確実なカメラの固定方法が課題でした。
この課題に対して、Φ2mmのビスとナットでの固定で解決。
カメラ後方から小さな棒状の固定部品でカメラを定位置に押し付け、その固定部品の後ろからビスでカメラホルダーに固定する構造としました。
また併せてカメラ用基板の取付け部もカメラホルダーと一体化設計しました。

固定部品を追加することで確実なカメラ固定が可能になりました
■ ③ ロボット下部筐体の再設計
ロボットが載った四角い筐体にはロボットの動作を制御する小型PCや特殊なマイクとマイク用基板ケースなどが収まります。
この筐体設計での課題も主に強度面。元の試作品は3Dプリントによるものだったせいもあるのか、上ケース・底板とも各部で大きな歪みが見られました。
よりしっかりした構造にするため、まず元の設計で厚み2mmだった樹脂製底板を、厚み3mmのアルミ素材に変更。底板を固定するボルトの直径もΦ3mmからΦ4mmに変えました。
上ケースもABS素材の切削部品に変更し、歪まない強度を確保しました。
また特殊マイクが収まる部分は部分的に厚み23mmとして高性能なマイクが不要な振動を起こしにくい設計としました。
■ 納品後のご評価
最初に10台の試作製作のご依頼を受けたのが2019年末で、昨年2021年にも7台の追加製作依頼を頂戴いたしました。
この事がオムロンソーシアルソリューションズ株式会社様の弊社へのご評価だと考えております。